Leads

Stephane Morel ‘25
Electrical & Computer Engineering
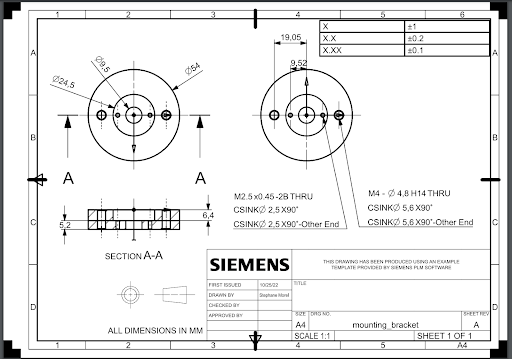
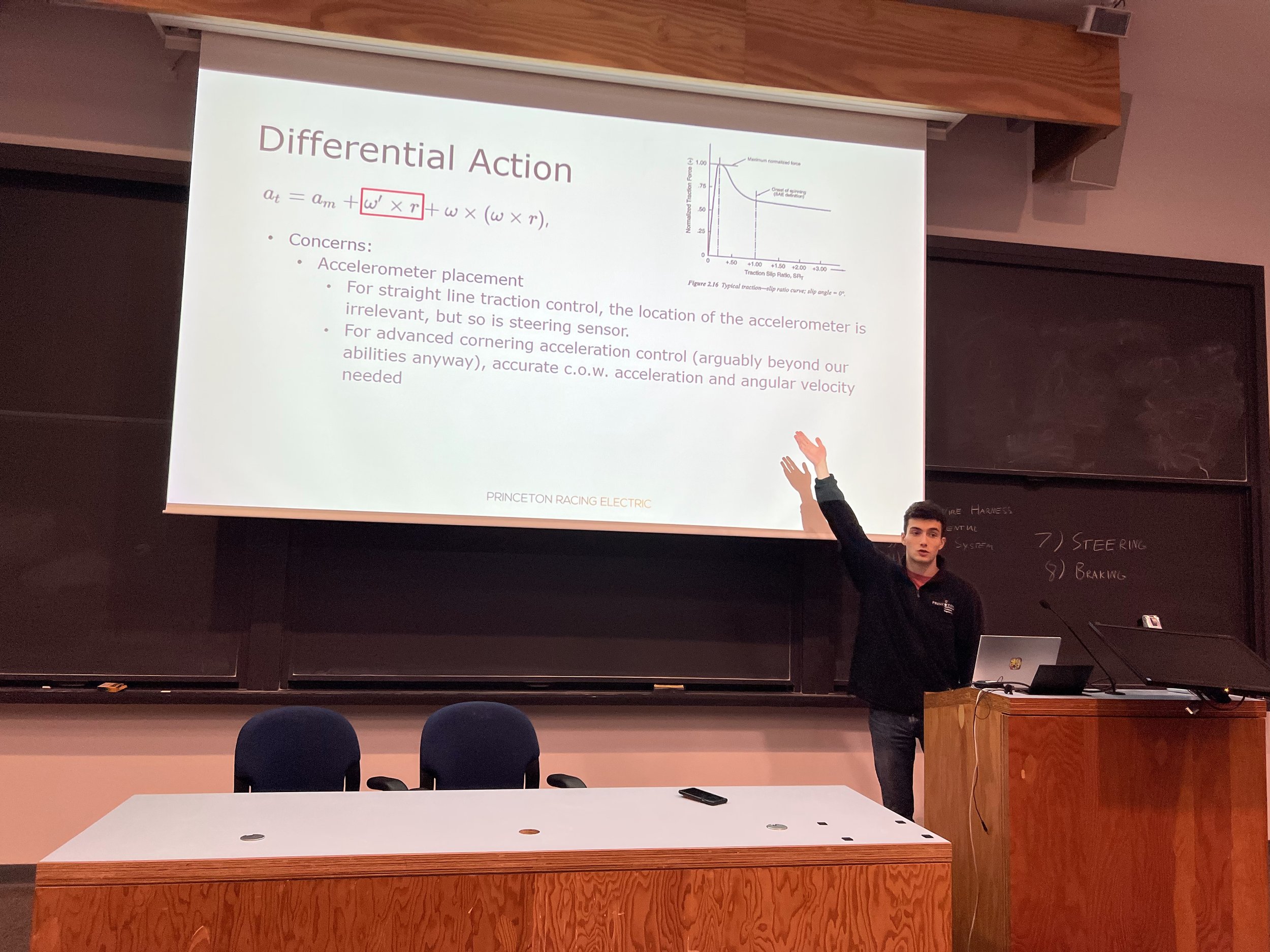
Traction control is critical for acceleration performance with an imperfect driver. Our team installs the necessary sensors and develops control algorithms to both limit slip ratio and help improve both static and dynamic cornering performance. We combine 10 data sources coming over CAN and RS-435, including the temperatures and speeds of the individual motors, the position of the steering wheel, and of course the acceleration pedal to produce the required torque or speed control on each of our wheels.
team



what we do